Шасси на сферических колёсах
Система привода Сферического колеса
выдержка из Патента
Система привода сферического колеса(СПСК) обеспечивает перемещение транспортного средства(ТС) качения в любом направлении и по любой траектории за счет цепно-приводных систем(ЦПС) , взаимно расположенных таким образом , чтобы вращать сферическое колесо во всех нужных направлениях за счет роликов , шарнирно закрепленных на звеньях цепи под углом к оси ведущей звездочки , которые вращаясь , образуют поверхность качения , и являют батарейный тип расположения роликов на цепи , делая цепь всенаправленной , трением и зацеплением роликами которого за протекторы колеса и приводится в действие колесо , и состоит из роликов , шарнирно и под углом размещенных на звеньях однорядной или многорядной цепи, для достижения максимального эффекта , может располагаться под 900 к другой ЦПС, в таком случае расположения осей роликов будет эффективнее при размещении перпендикулярно к оси вращения цепи. Приводится в действие ведущими звездочками , шестернями , или роликами и опираясь через ведомые звездочки , ролики , катки и т.п. на колесо , за счет чего каждая цепно-приводная система гарантированно управляет определенной осью вращения колеса и обеспечивает эффект сверхманевренности .

ЦПС
Рис.1
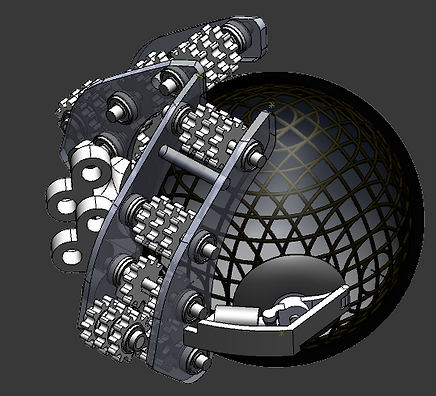

2 ) Устройство по п.1 требует системы(«гнезда»), удерживающей колесо свободно вращающимся шарнирно в заданном пространстве с определенными техническими параметрами и может состоять из набора роликов, расположенных радиально, относительно центра колеса и находящихся в горизонтальной плоскости, а также подпружиненных поворотных колёс, находящихся в горизонтальной плоскости ниже плоскости радиальных роликов, обеспечивая невыпадение колеса при возможности его свободного вращения.
Так же колесо можно удерживать небольшими «тарелками»( Рис.2, отмечены голубым), которые не только прижимают колесо к ЦПС но и могут играть роль тормозов, если повернуть их по направлению к центру колеса и стопорить.
3) Конструкция сверхманевренного шасси может видоизменяться конфигурацией СПСК, тем самым изменяя способ приведения в действие сферического колеса, например:
• Тип 1: ЦПС перпендикулярны друг другу, оси роликов так же перпендикулярны оси ведущих звёздочек ЦПС, на котором они расположены. Таким образом приведение в действие колеса каждой ЦПС осуществляется независимо друг от друга (Рис.3)
•Преимущества: облегчённая конструкция трансмиссии и управления.
•Недостатки: большие габариты.
"гнездо"
Рис.2
Рис.3
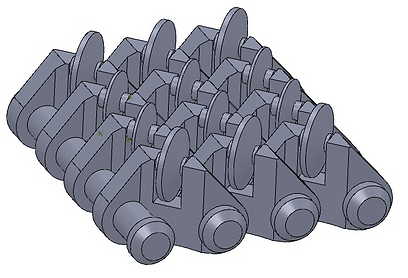
Рис.4

Рис.5
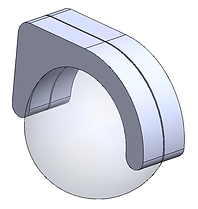
Рис.6
Тип 3: 3 ЦПС расположены под углом ~450 относительно горизонтальной плоскости и ~600 между собой, являя телесный угол, выходящий из центра колеса и расширяющийся кверху (Рис.7).
•Преимущества: можно использовать в одноколёсном транспортном средстве(ТС)
•Недостатки: только для электромоторов, ограничение на высокие скорости.
3) Конструкция сверхманевренного шасси может видоизменяться конфигурацией СПСК, тем самым изменяя способ приведения в действие сферического колеса, например:
Тип 2: ЦПС параллельны друг другу и зеркально отображены (Рис.5), их батареи роликов так же зеркально отображены и расположены перпендикулярно друг другу, а оси роликов находятся под углом 450 (можно варьировать) к ведущим звёздочкам своих ЦПС (Рис.4). Тем самым приведение колеса в действие - есть результат совместной и скоординированной работы обеих ЦПС.
Тип 2.1: ЦПС установлены в одной плоскости (Рис.6)
•Преимущества: большая компактность.
•Недостатки: -только для электромоторов, ограниченность хода при более сложных (реальных дорожных) условиях.

Модульность и гибкость технологий
Также любое из вышеупомянутых типов СПСК , при смещении одного или всех ЦПС симметрично в любую сторону на любое незначительное расстояние ( D/100 ) , или угол (1-3 °) , дает эффект автоматического вращения колеса обеспечит равномерный износ сферического колеса при любых адекватных условий использования.
Относительно сферо - подшипникового гнезда , то использовать можно очень широкий спектр « подшипников » от шаровых до дисковых и тарельчатых ( Рис.3 ) , которые могут быть любой формы тела качения.
Помимо ЦПС есть ещё один интересный вид СПСК – ролики, расположенные по кругу, ось вращения которого проходит через центр сферического колеса, а сами ролики посредством системы двух синхронных и горизонтально смещённых колец (или дисков, на которых они закреплены таким образом, что всегда направлены вертикально) прижаты к протекторам колеса. Что так же является видом батарейного расположения роликов, позволяющих крутиться сферическому колесу в горизонтальной оси, перпендикулярной к оси вращения данной СПСК.
Система привода сферического колеса решает главные проблемы, превращая сферическое колесо в паразитную шестерню и обеспечивает стабильную работу транспортного средства. А универсальность этого типа шасси позволяет применять его во всех сферах транспорта...
Вот и мы с дизайнерами представляем Вам некоторые наши работы.
Замечу- ВСЕ эти концепты вполне реализуемы в ближайшем будущем!!!
 |  |  |
|---|---|---|
 |  |  |
 |  |  |
Так оказалось, что приводные системы для шаров настолько универсальны, что их можно использоваль в мотоциклостроении, бульдозеростроении, возможно даже в танкостроении(но тут мы можно предложить более совершенные решения) можно использовать в игрушках, в автомобилестроении и роботостроении, выводя новый класс "S", поскольку управление этой техникой отличается кардинально, хотя и является так же простейшим для простых машин, и сложным для более ответственных. Но сама возможность не зависеть от пробок, от погодных условий, от класса техники, которую используешь, от ширины дороги для разворота/поворота, от загородившего дорогу...
Активно можно использовать сферические шасси и в спорте, в квадроциклах(квадросферах) Да и в принципе в любой технике.
Анализ сфероколёсных шасси
Упомянутые виды СПСК, и различные способы удержания колеса в заданном пространстве, можно комбинировать для достижения максимальных эффектов. Тем не менее такой вид шасси имеет определённые (и пока не решённые) недостатки, в частности- крупные габариты, большие потери на трение и управление, сложность в производстве и обслуживании, относительно быструю изнашиваемость.
И пока единственного и наиболее эффективного варианта выявлено не было.
Но главными направлениями поиска решения проблем эффективности сверхманевренных шасси являются:
1) *отсутствие перенаправления инерции*.
2) *чрезмерное трение*.
Итог глубокого анализа технологий:
Обеспечение перенаправления инерции сферического колеса порождает ещё большую сложность системы.
Паразитное трение решается креплением колеса на фиксированную ось.
Сферические колёса наиболее пригодны для массивной техники, или мотоциклов.
Решение:
Перенаправление инерции возможно лишь колесом, находящимся на разворачиваемой на 360 оси.
о